-
 0
0
-
 0
0
-

 Facebook
FacebookGiới thiệu sản phẩm
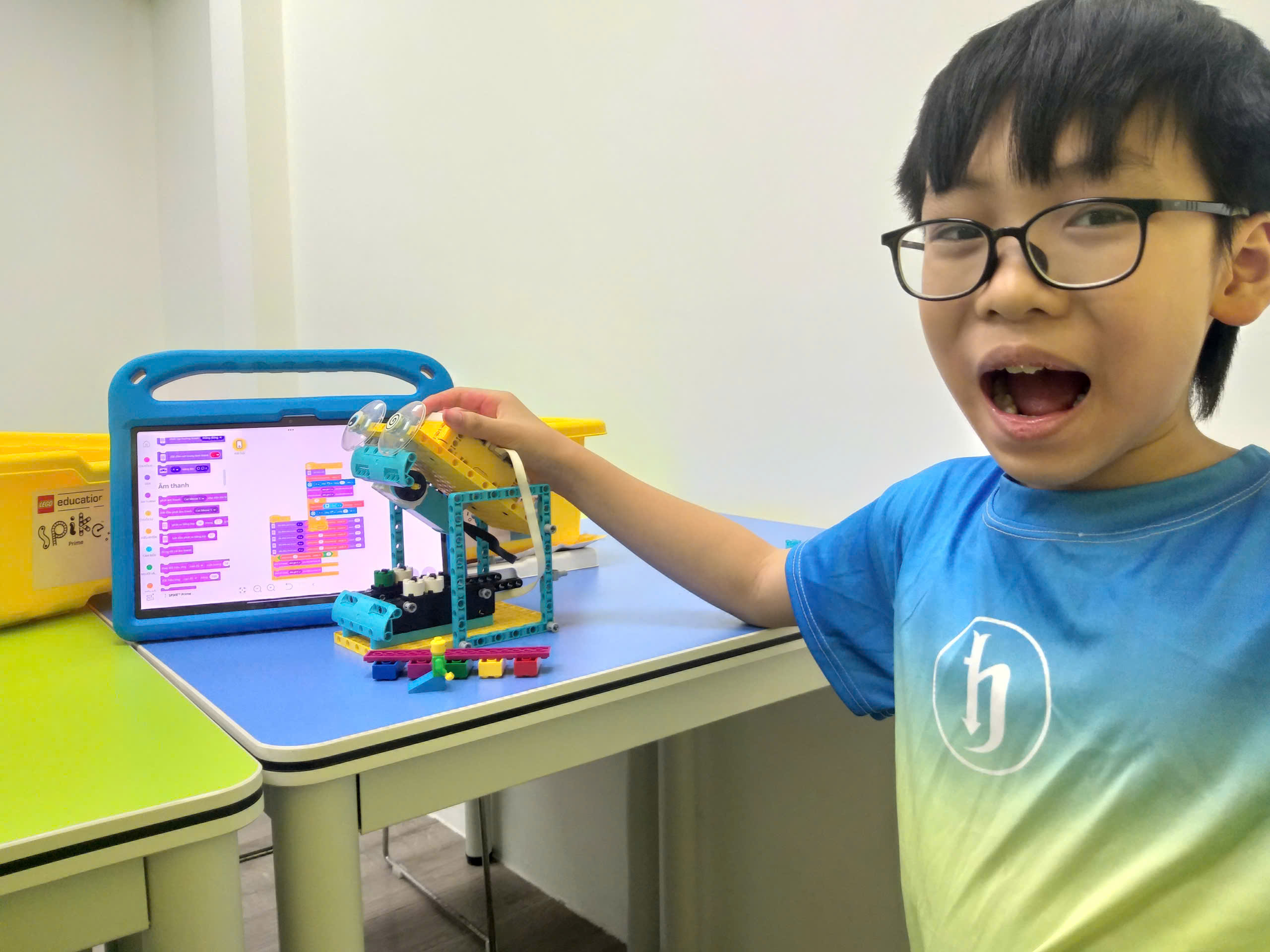
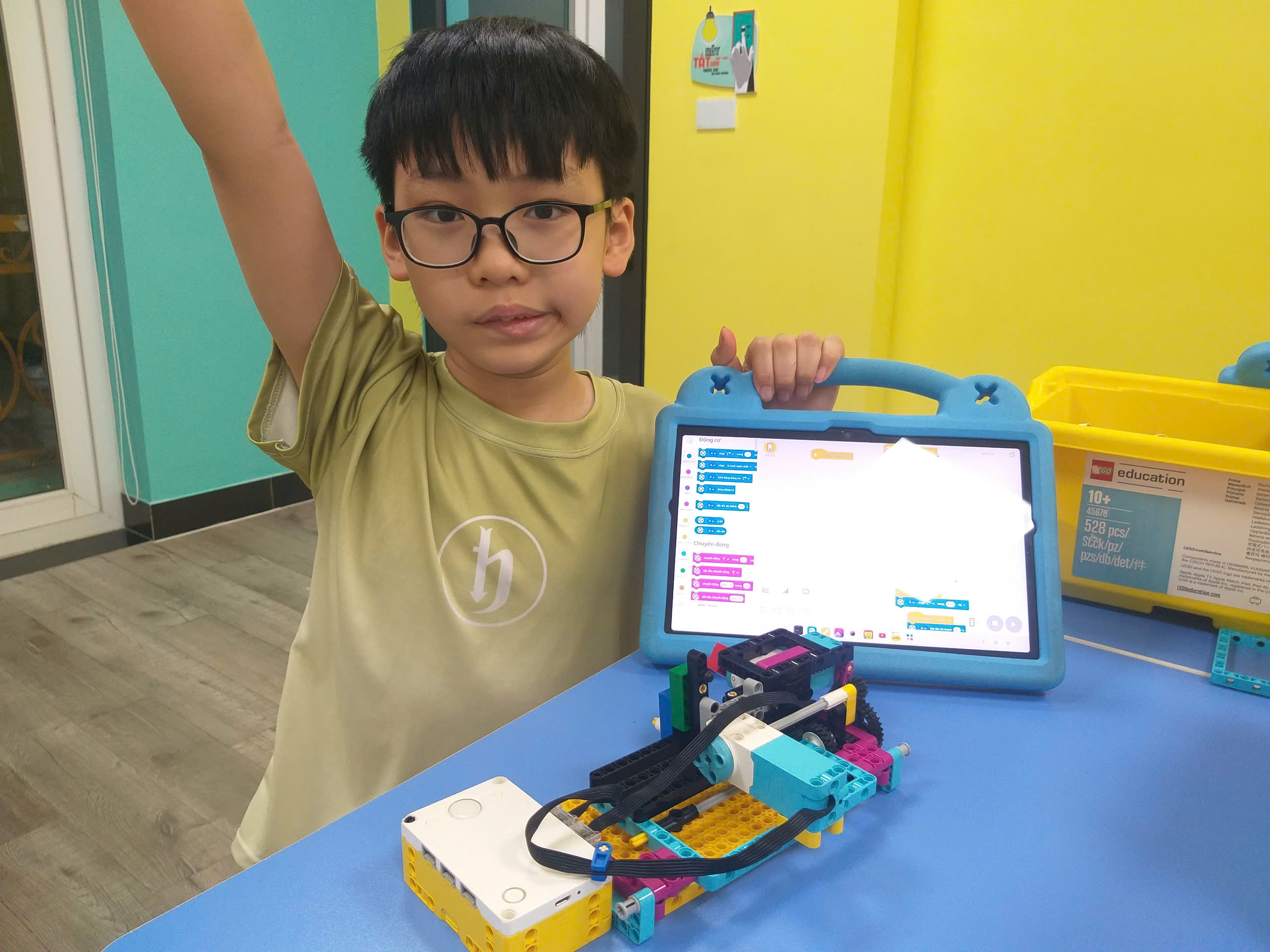
Lắp ráp mô hình Robot Rhino (Robot gồm 2 phần: phần thân gắn bánh xe di chuyển và phần đầu gắn với cảm biến chạm)
Lập trình cho Rhino di chuyển đến vị trí khối gạch được đặt tại vị trí ở một khoảng cách cho trước
Lập trình ứng dụng tính toán để thiết lập thông số cho khối lệnh di chuyển để Robot dừng chính xác tại một vị trí chỉ định
Lập trình sử dụng khối lệnh thiết lập di chuyển dựa theo quãng đường đo được tính bằng cm
Lập trình sử dụng cảm biến lực nhấn để Robot dừng tại vị trí khi cảm biến được nhấn
Nâng cấp kỹ năng lập trình với việc thay đổi kích thước các loại bánh xe, tính toán chu vi và thực hiện lập trình cho Robot đến đúng vị trí
Lập trình cho Rhino di chuyển đến vị trí khối gạch được đặt tại vị trí ở một khoảng cách cho trước
Lập trình ứng dụng tính toán để thiết lập thông số cho khối lệnh di chuyển để Robot dừng chính xác tại một vị trí chỉ định
Lập trình sử dụng khối lệnh thiết lập di chuyển dựa theo quãng đường đo được tính bằng cm
Lập trình sử dụng cảm biến lực nhấn để Robot dừng tại vị trí khi cảm biến được nhấn
Nâng cấp kỹ năng lập trình với việc thay đổi kích thước các loại bánh xe, tính toán chu vi và thực hiện lập trình cho Robot đến đúng vị trí


Sản phẩm cùng tác giả
-
 Nhà sáng tạo Nguyễn Bình Long 9 tuổimáy phân loại sản phẩm
Nhà sáng tạo Nguyễn Bình Long 9 tuổimáy phân loại sản phẩm -
 Nhà sáng tạo Nguyễn Bình Long 9 tuổiCUỘC ĐUA BỌ
Nhà sáng tạo Nguyễn Bình Long 9 tuổiCUỘC ĐUA BỌ -
 Nhà sáng tạo Nguyễn Bình Long 9 tuổiCÁNH TAY ROBOT
Nhà sáng tạo Nguyễn Bình Long 9 tuổiCÁNH TAY ROBOT
Đăng nhập để tham gia bình luận