-
 0
0
-
 0
0
-

 Facebook
FacebookGiới thiệu sản phẩm
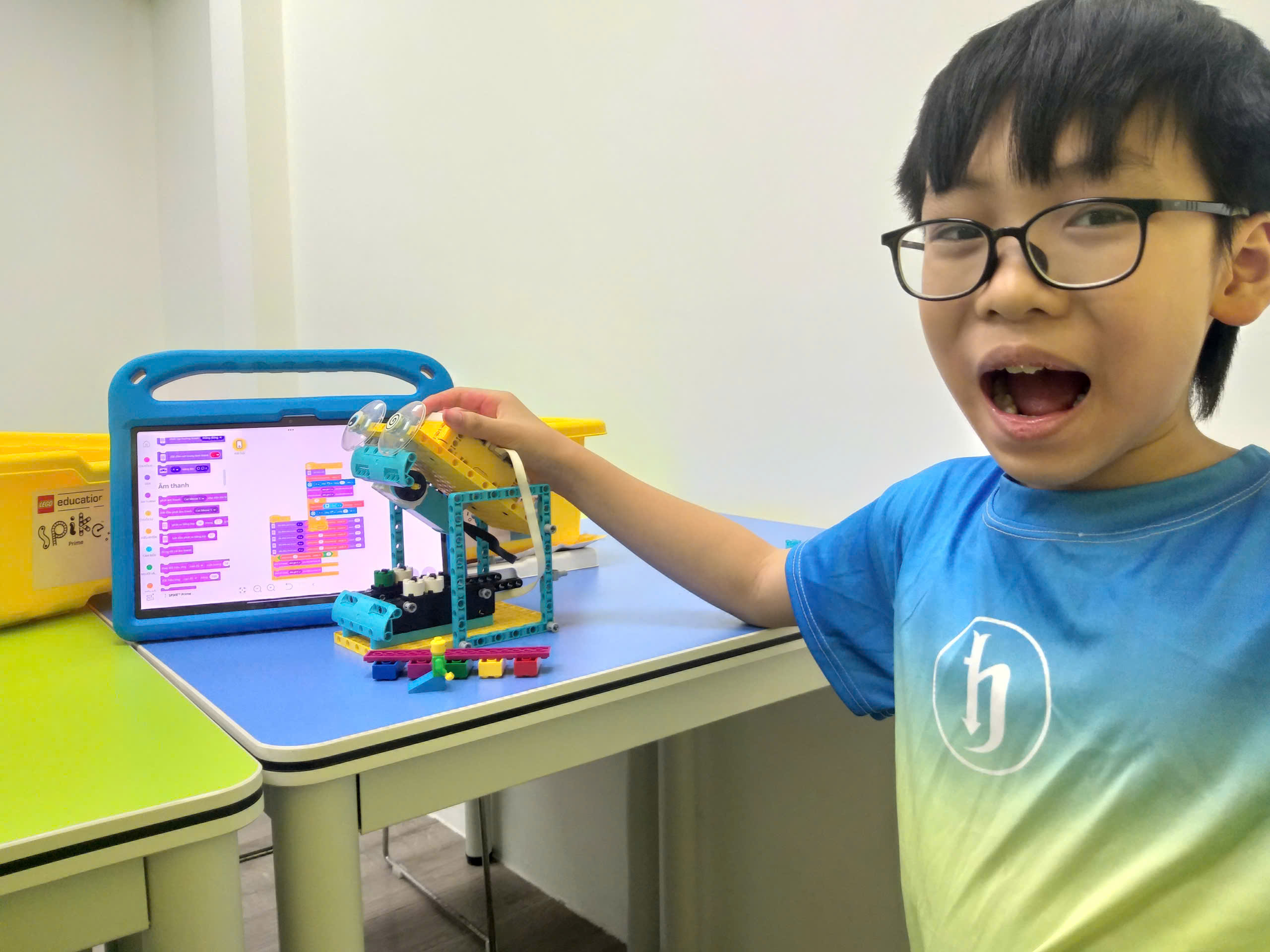
Grabbers
- Dự án là Robot Grabbers, được lắp ráp từ spike prime với 1 động cơ, cảm biến lực và smart hub.
- Robot có chức năng thực hiện các thao tác đóng mở tay để gắp đồ vật (rác thải với hình dáng và kích thước khác nhau)
- Lập trình cho tay gắp thực hiện trạng thái đóng, mở để gắp thả đồ vật
- Lập trình điều khiển tay gắp với nút thả nút nhấn trên smarthub
- Lập trình điều khiển tay gắp với cảm biến lực nhấn với chức năng chạm
- Thay đổi cơ cấu tay gắp với hình dáng khác nhau phù hợp với từng đồ vật có hình dáng/ kích thước khác nhau
- Nâng cấp chương trình lập trình thực hiện lực gắp đồ vật dựa trên lực nhấn đo được từ cảm biến lực
- Dự án là Robot Grabbers, được lắp ráp từ spike prime với 1 động cơ, cảm biến lực và smart hub.
- Robot có chức năng thực hiện các thao tác đóng mở tay để gắp đồ vật (rác thải với hình dáng và kích thước khác nhau)
- Lập trình cho tay gắp thực hiện trạng thái đóng, mở để gắp thả đồ vật
- Lập trình điều khiển tay gắp với nút thả nút nhấn trên smarthub
- Lập trình điều khiển tay gắp với cảm biến lực nhấn với chức năng chạm
- Thay đổi cơ cấu tay gắp với hình dáng khác nhau phù hợp với từng đồ vật có hình dáng/ kích thước khác nhau
- Nâng cấp chương trình lập trình thực hiện lực gắp đồ vật dựa trên lực nhấn đo được từ cảm biến lực


Sản phẩm cùng tác giả
-
 Nhà sáng tạo Nguyễn Bình Long 9 tuổiCHINH PHỤC KHOẢNG CÁCH
Nhà sáng tạo Nguyễn Bình Long 9 tuổiCHINH PHỤC KHOẢNG CÁCH -
 Nhà sáng tạo Nguyễn Bình Long 9 tuổimáy phân loại sản phẩm
Nhà sáng tạo Nguyễn Bình Long 9 tuổimáy phân loại sản phẩm -
 Nhà sáng tạo Nguyễn Bình Long 9 tuổiCUỘC ĐUA BỌ
Nhà sáng tạo Nguyễn Bình Long 9 tuổiCUỘC ĐUA BỌ
Đăng nhập để tham gia bình luận